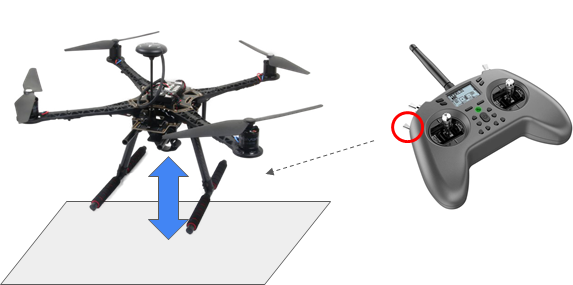
စီးပွားဖြစ် ဒရုန်းကဲ့သို့ ရေဒီယိုဖြင့် လည်ပတ်နိုင်သည်။ အလိုအလျောက် ပျံသန်းစဉ်အတွင်း အနှောင့်အယှက်ပေးသည့် လုပ်ဆောင်ချက်များလည်း ဖြစ်ပေါ်နိုင်သောကြောင့် ဘေးကင်းမှုကို အာမခံနိုင်ပါသည်။ ရေဒီယို၏ ဆင်းသက်ခလုတ်ကို အဖွင့်/ပိတ်လိုက်ရုံဖြင့်၊ သင်သည်ပျံသန်းမှုထိန်းကိရိယာဖြင့် ဘေးကင်းစွာ အလိုအလျောက် ဆင်းသက်နိုင်မည်ဖြစ်သည်။