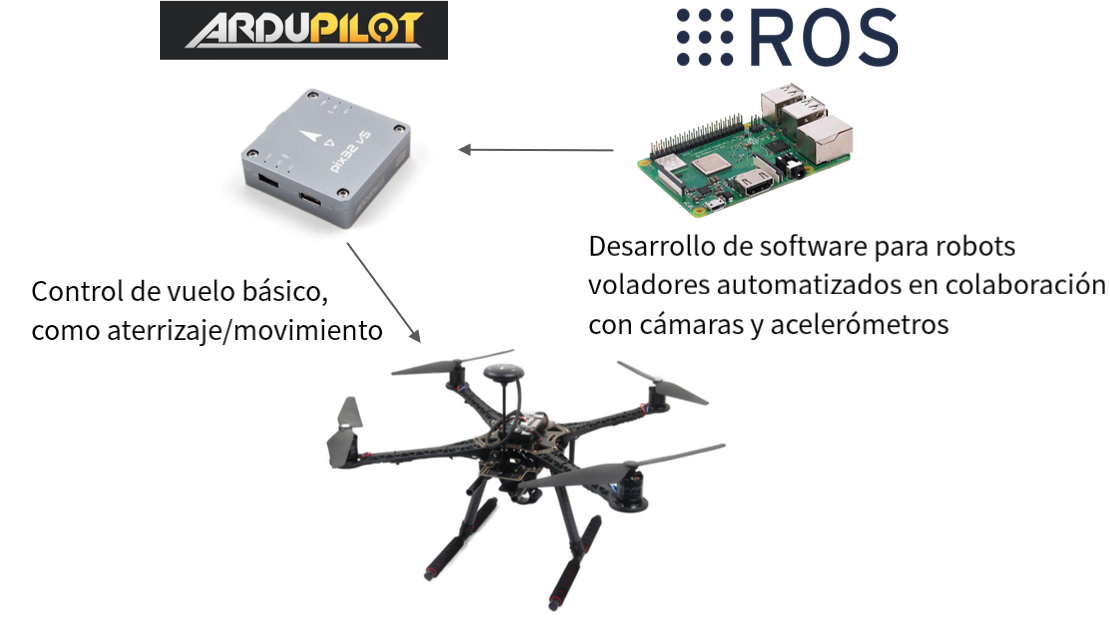
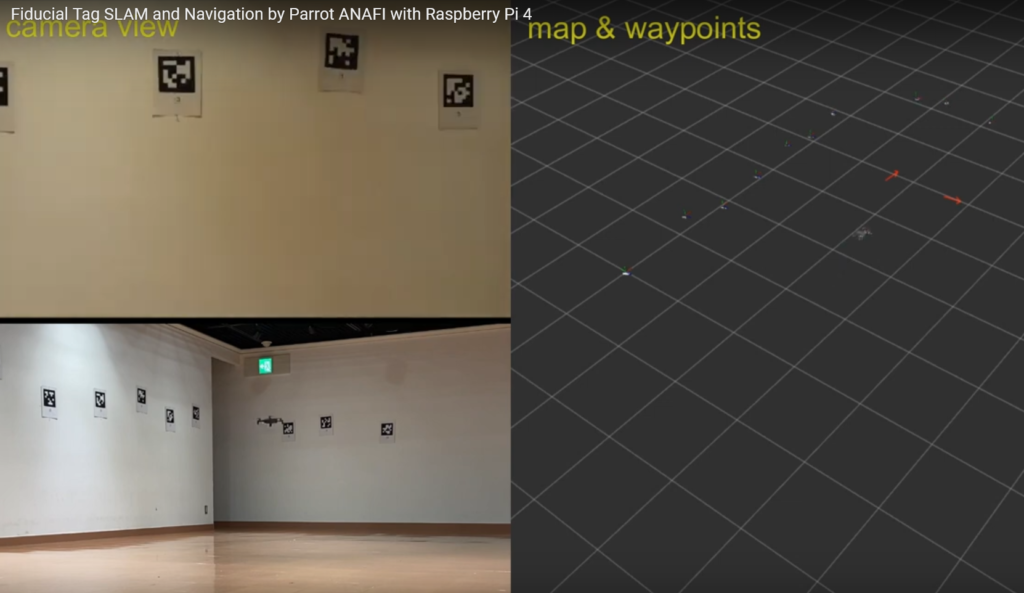
Usar Raspberry Pi y ROS para el control de vuelo automático, y Pixhawk y Ardu Pilot para el control de vuelo básico de drones. Estos se utilizan en todo el mundo en el campo del desarrollo de drones, por lo que si los domina, puede desempeñar un papel activo como ingeniero de drones en cualquier parte del mundo.