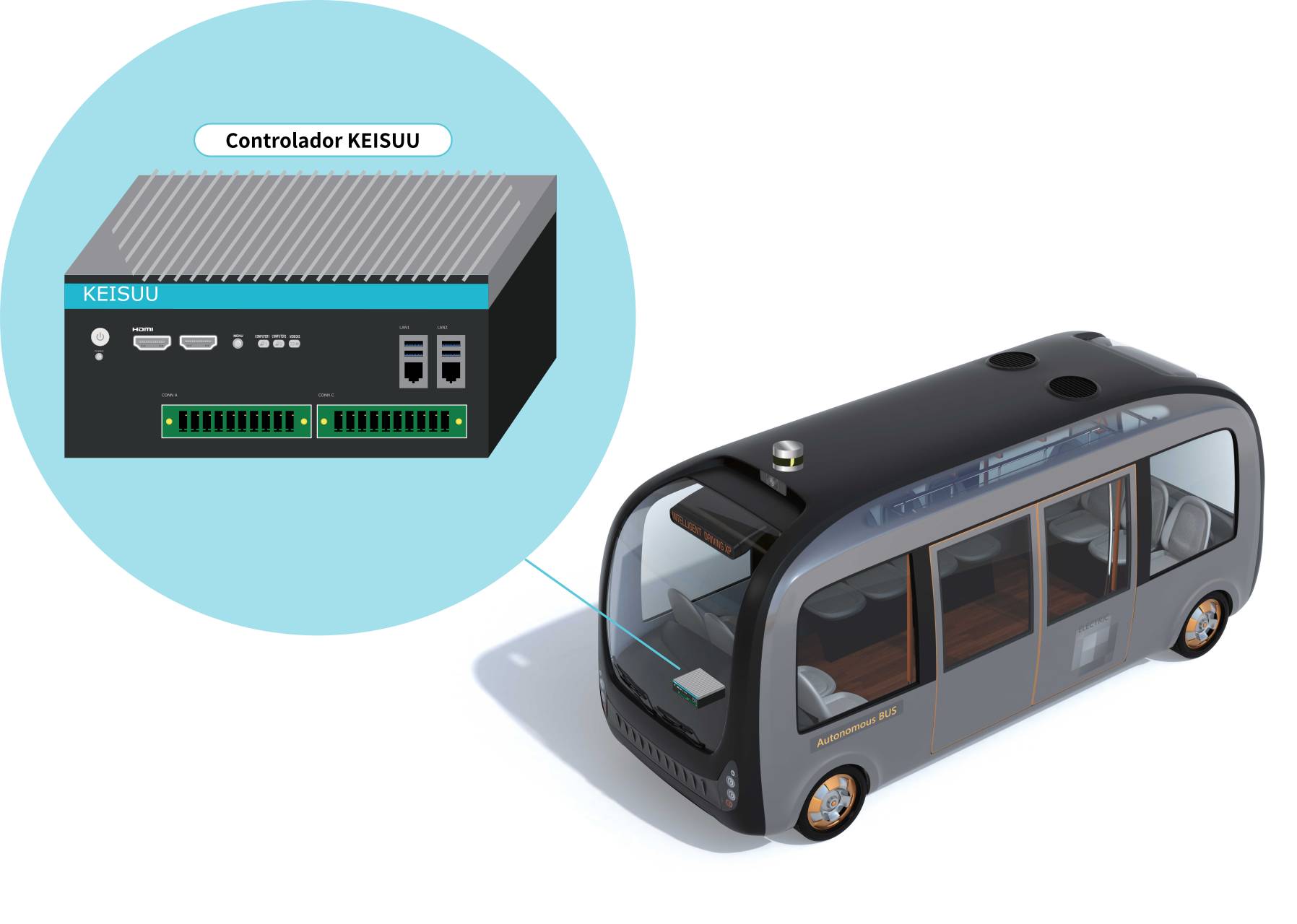
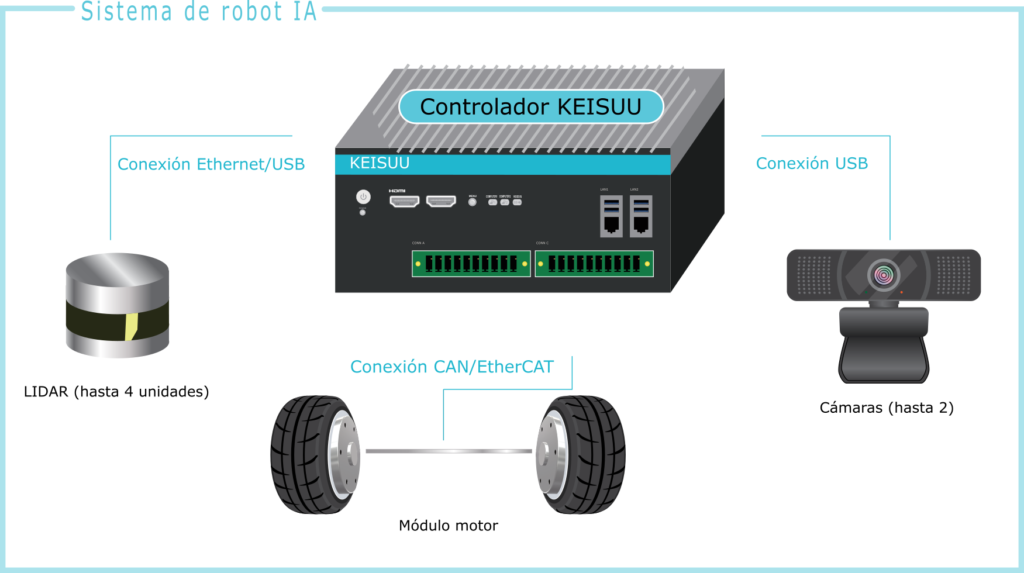
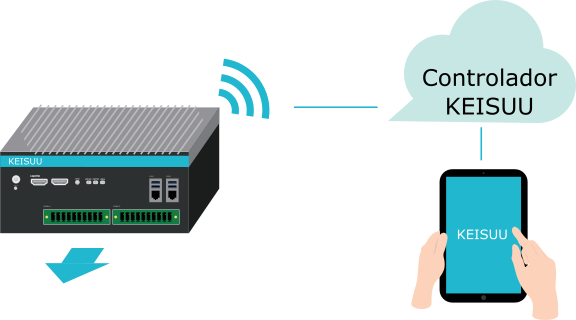
Simplemente instálelo en la carrocería del vehículo y funcionará con la aplicación y la nube. Una computadora tipo caja que proporciona el último sistema de inteligencia artificial robótica.
1. Se pueden gestionar/vincular y controlar varios robots con una sola aplicación. 2. El mapa ambiental para la conducción autónoma se puede compartir entre varios robots. 3. La función de cooperación de robots se puede utilizar en un sitio remoto a través del servicio en la nube. 4. El control de movimiento se puede optimizar automáticamente según el peso del vehículo. 5. Puede usar las últimas funciones de seguimiento, como la función de memoria de huella del objetivo de seguimiento.
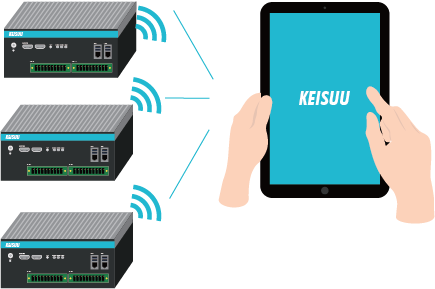
Puede usar la aplicación instalada en su tableta (Android / iOS) para operar el control remoto, administrar múltiples robots, verificar el estado de funcionamiento, el nivel de la batería, etc.
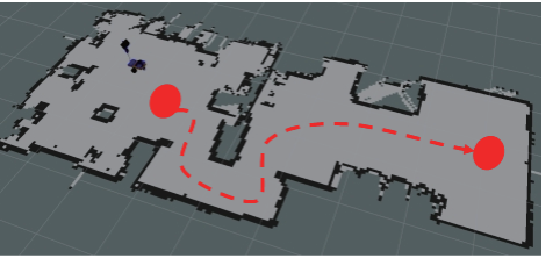
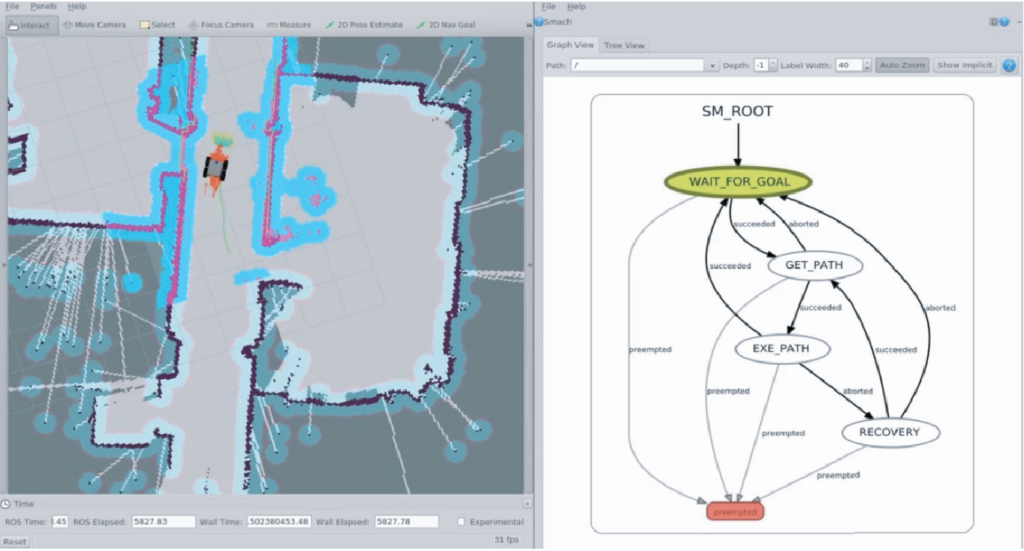
Puedes crear un mapa del entorno y desplazarte con seguridad hasta el punto indicado.
Este mapa puede estar compartido entre varios robots.
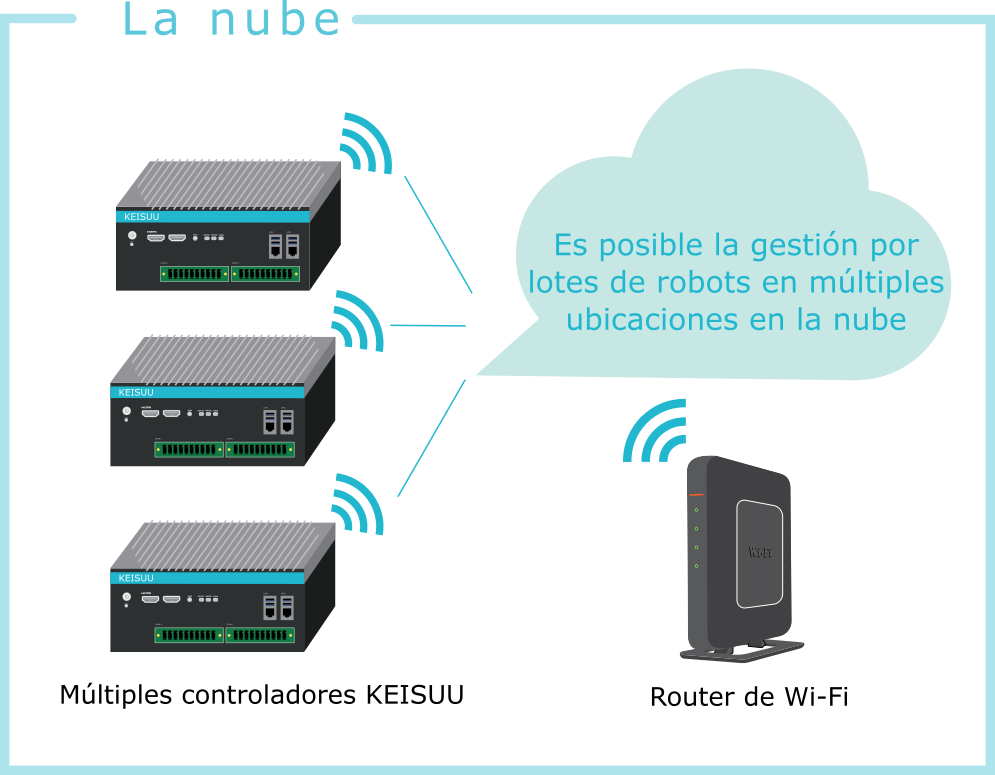
Con el servicio en la nube exclusivo proporcionado por el controlador KEISUU, la gestión de robots se puede realizar entre sitios remotos.
Controlará automáticamente el movimiento más adecuado según el peso cargado/remolcado por el robot.
Lentamente cuando la carga es pesada
Rápido cuando la carga es ligera
Puede operar en interiores/exteriores
Fuerte contra la influencia de la luz exterior
No es necesaria una baliza para el seguimiento, y el seguimiento es posible con un solo robot.
Incluso si pierde el rastro del objetivo, correrá de forma segura por la ruta recordada.
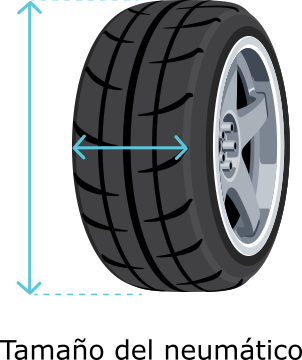
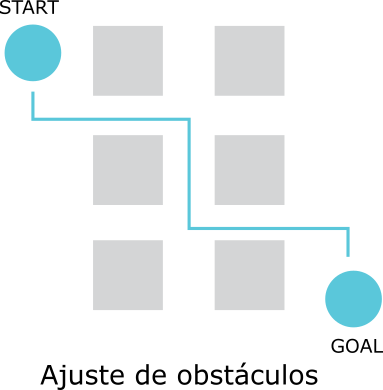
En la primera configuración, configure aproximadamente el entorno, como el tamaño y la posición de fijación del neumático y el tamaño del obstáculo.
Una vez completada la configuración inicial, se llevará a cabo la configuración de alineación en el sitio para confirmar la operación.
Ponga el controlador KEISUU en una CAJA con ruedas, etc.
Suspender los neumáticos y comprobar la seguridad (operación por control remoto).
Compruebe el funcionamiento (funcionamiento del mando a distancia) en el entorno real colocándolo en el suelo.
Conéctese al controlador KEISUU desde su PC a través de WiFi y ajuste los parámetros mientras verifica si se reconocen los obstáculos y los objetivos de seguimiento en las cercanías.